基本情報技術者(科目A)過去問集 - 計測・制御に関する理論
令和7年6月修了試験 問4
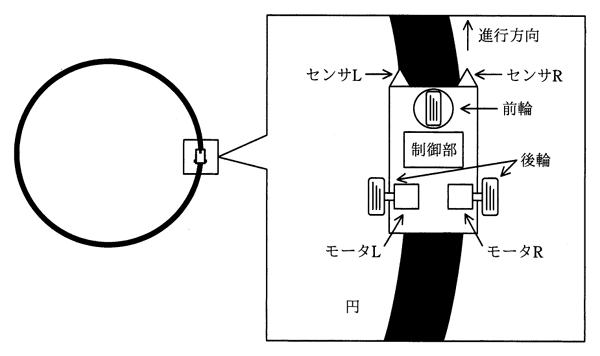
図のような黒色で描かれた円に沿って車が走るように,左右の後輪に独立に取り付けられたモータL及びRの回転速度を制御する。センサL及びRは反射型光センサであり,センサが黒色に掛かる比率が大きいと出力値が小さくなり,黒色に掛かる比率が小さいと出力値が大きくなる。この車を円に沿って走行させるためのモータ回転速度の制御方法として,適切なものはどれか。ここで,二つのセンサの出力値が一致するときには,二つのモータの回転速度を初期値に戻すものとする。
| センサL出力値>センサR出力値 のとき | センサL出力値<センサR出力値 のとき | |||
| モータL 回転速度 | モータR 回転速度 | モータL 回転速度 | モータR 回転速度 | |
| ア | 上げる | 下げる | 上げる | 下げる |
| イ | 上げる | 下げる | 下げる | 上げる |
| ウ | 下げる | 上げる | 上げる | 下げる |
| エ | 下げる | 上げる | 下げる | 上げる |
令和5年12月修了試験 問4
PCM方式によって音声をサンプリング(標本化)して8ビットのデジタルデータに変換し,圧縮せずにリアルタイムで転送したところ,転送速度は64,000ビット/秒であった。このときのサンプリング間隔は何マイクロ秒か。
| ア | 15.6 |
|---|---|
| イ | 46.8 |
| ウ | 125 |
| エ | 128 |
令和5年1月修了試験 問22
音声を標本化周波数10kHz,量子化ビット数16ビットで4秒間サンプリングして音声データを取得した。この音声データを,圧縮率1/4のADPCMを用いて圧縮した場合のデータ量は何kバイトか。ここで,1kバイトは1,000バイトとする。
| ア | 10 |
|---|---|
| イ | 20 |
| ウ | 80 |
| エ | 160 |
令和4年7月修了試験 問6
| ア | 20 |
|---|---|
| イ | 40 |
| ウ | 80 |
| エ | 640 |
答え : ウ
分野 : テクノロジ系 › 基礎理論 › 基礎理論 › 計測・制御に関する理論
分野 : テクノロジ系 › 基礎理論 › 基礎理論 › 計測・制御に関する理論
平成29年秋期 問3
フィードバック制御の説明として,適切なものはどれか。
| ア | あらかじめ定められた順序で制御を行う。 |
|---|---|
| イ | 外乱の影響が出力に現れる前に制御を行う。 |
| ウ | 出力結果と目標値とを比較して,一致するように制御を行う。 |
| エ | 出力結果を使用せず制御を行う。 |
答え : ウ
分野 : テクノロジ系 › 基礎理論 › 基礎理論 › 計測・制御に関する理論
分野 : テクノロジ系 › 基礎理論 › 基礎理論 › 計測・制御に関する理論
平成28年秋期 問5
| ア | 標本化,量子化,符号化 |
|---|---|
| イ | 符号化,量子化,標本化 |
| ウ | 量子化,標本化,符号化 |
| エ | 量子化,符号化,標本化 |
答え : ア
分野 : テクノロジ系 › 基礎理論 › 基礎理論 › 計測・制御に関する理論
分野 : テクノロジ系 › 基礎理論 › 基礎理論 › 計測・制御に関する理論
平成22年春期 問4
フィードバック制御の説明として,適切なものはどれか。
| ア | 外乱による影響を検知してから修正動作を行う。 |
|---|---|
| イ | 外乱に弱く,それらの影響を増幅させてしまう。 |
| ウ | 外乱を検知して,その影響が出ないように修正動作を行う。 |
| エ | 外乱を予測して修正動作を行う。 |
答え : ア
分野 : テクノロジ系 › 基礎理論 › 基礎理論 › 計測・制御に関する理論
分野 : テクノロジ系 › 基礎理論 › 基礎理論 › 計測・制御に関する理論
平成21年秋期 問4
産業機器の機器制御に使われるシーケンス制御の説明として,適切なものはどれか。
| ア | あらかじめ定められた順序又は条件に従って,制御の各段階を逐次進めていく制御方法である。 |
|---|---|
| イ | 外乱が予測できる場合に,あらかじめ外乱を想定して前もって必要な修正動作を行う制御方法である。 |
| ウ | 制御量を常に検出して制御に反映しているので,予測できないような外乱に強い制御方法である。 |
| エ | “やや多い”,“やや少ない” などあいまい性に基づく制御方法である。 |
答え : ア
分野 : テクノロジ系 › 基礎理論 › 基礎理論 › 計測・制御に関する理論
分野 : テクノロジ系 › 基礎理論 › 基礎理論 › 計測・制御に関する理論